
الجراحة الروبوتية عن بُعد: كيف يجري طبيب في لندن عملية في نيروبي؟
هل يمكن لمشرط جراحي أن يعبر القارات دون أن يغادر يد صاحبه؟
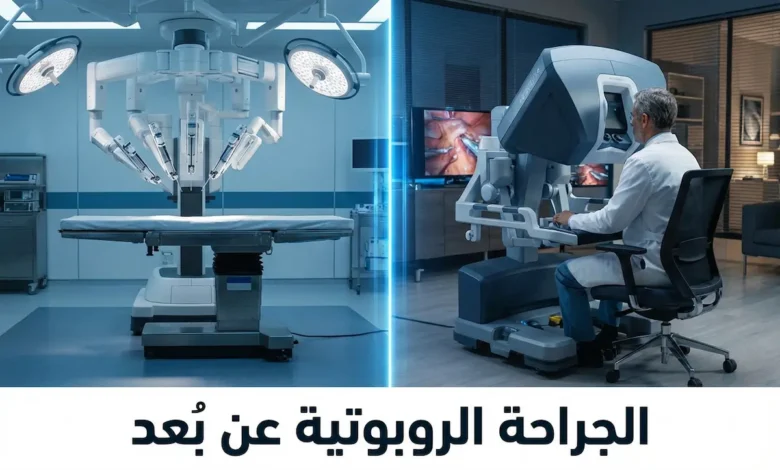
الجراحة الروبوتية عن بعد هي إجراء طبي يتحكم فيه الجراح بروبوت جراحي موجود في موقع جغرافي بعيد عبر شبكات اتصال فائقة السرعة. تعتمد هذه التقنية على وحدة تحكم رقمية تترجم حركات يد الطبيب إلى أوامر دقيقة ينفذها ذراع آلي في غرفة عمليات قد تبعد آلاف الكيلومترات، مما يتيح وصول الخبرات الجراحية النادرة إلى المناطق المحرومة.
هل فكرت يوماً أنك قد تحتاج إلى جراح متخصص لا يوجد منه سوى عشرة في العالم كله، وأنت تعيش في مدينة لا يصلها حتى طبيب عام بسهولة؟ تخيل أن والدتك تحتاج عملية دقيقة في الكلى، والجراح الوحيد القادر على إنقاذها يجلس في عيادته بلندن. في الماضي، كان الحل الوحيد هو تذكرة طائرة باهظة ورحلة مرهقة قد لا يتحملها المريض أصلاً. لكن ما ستقرأه في هذا المقال سيغير نظرتك تماماً لمفهوم “المسافة” في الطب. ستفهم كيف أصبح ممكناً أن يمسك جراح في لندن بمقبضي تحكم ويحرك مشرطاً روبوتياً داخل جسد مريض في نيروبي، وكأنه يقف بجانبه تماماً.
📌 خلاصة المقال في دقيقة
🔹 ما حدث فعلاً
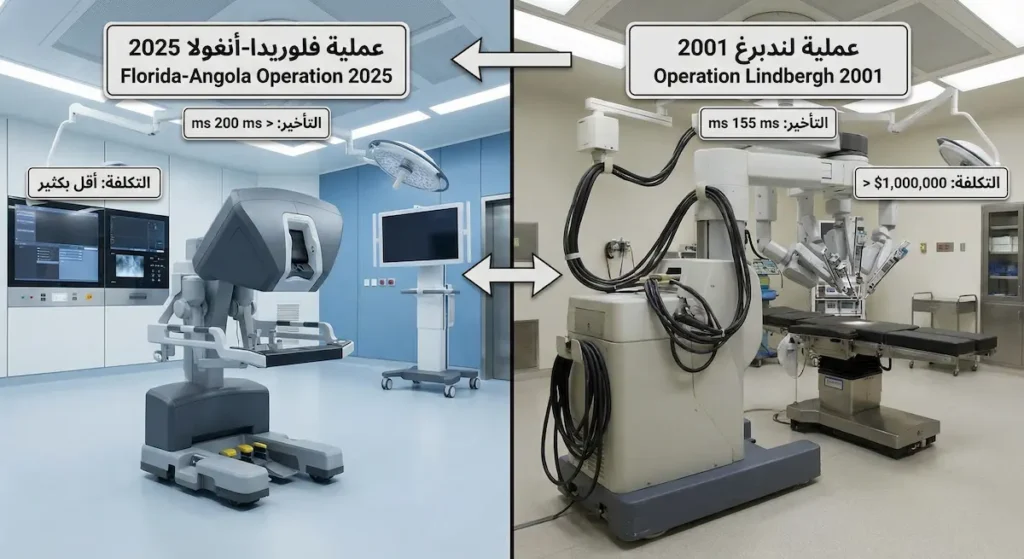
- في عام 2025، أجرى جراح في فلوريدا عملية ناجحة لمريض في أنغولا عن بُعد — على مسافة تتجاوز 10,000 km — بتأخير أقل من 200 ms.
- هذه ثاني عملية عابرة للقارات في التاريخ بعد عملية لندبرغ عام 2001، لكنها الأولى بتكلفة واقعية وبنية تحتية قابلة للتكرار.
🔹 كيف تعمل التقنية
- ثلاث حلقات: وحدة تحكم تترجم حركة الجراح إلى إشارة رقمية ← ألياف ضوئية وشبكات 5G تنقلها فوراً ← روبوت جراحي ينفذها بدقة 0.1 mm.
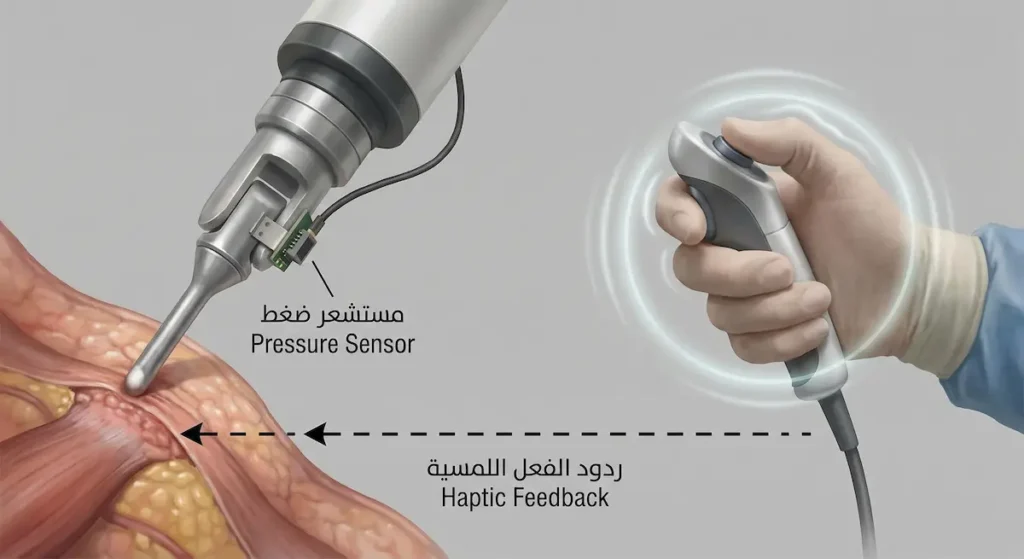
- تقنية ردود الفعل اللمسية (Haptic Feedback) تسمح للجراح بالإحساس بمقاومة الأنسجة عن بُعد.
🔹 تحذيرات وتحديات حقيقية
- أي تأخير يتجاوز 200 ms يهدد سلامة المريض — و500 ms يجعل العملية خطيرة.
- الأمن السيبراني تهديد موثق: أُثبت اختراق روبوت جراحي مخبرياً عام 2015.
- لا يوجد إطار قانوني دولي موحد يحدد المسؤولية عند حدوث خطأ عابر للحدود.
🔹 إذا عُرضت عليك هذه الجراحة
- اسأل عن زمن الوصول المتوقع — يجب ألا يتجاوز 200 ms.
- تأكد من وجود جراح احتياطي مؤهل بجانبك فعلياً في غرفة العمليات.
من لندن إلى نيروبي: مشرط الجراح الذي يقطع آلاف الأميال
تصور هذا المشهد: الساعة السابعة صباحاً في لندن. الدكتور أحمد — وهو جراح مسالك بولية بارع — يحتسي قهوته الصباحية في مكتبه المطل على نهر التيمز. يرتدي قفازات خاصة، يجلس أمام شاشة ثلاثية الأبعاد عالية الوضوح، ويضع يديه على مقبضي تحكم يشبهان عصا ألعاب الفيديو لكنهما أكثر حساسية بمراحل. على بعد 6,800 كيلومتر، في مستشفى بنيروبي، يرقد مريض كيني تحت التخدير الكامل. فوق بطنه، تتحرك أذرع روبوتية رشيقة بدقة لا تتجاوز أجزاء من المليمتر. كل حركة يقوم بها الدكتور أحمد بأصابعه في لندن تتحول فوراً إلى حركة مطابقة ينفذها الروبوت في نيروبي.
هذا ليس مشهداً من فيلم خيال علمي. إنه الواقع الذي بدأ يتحقق فعلاً في عام 2025. لقد كشفت الجراحة الروبوتية عن بعد عن إمكانية حقيقية لسد الفجوة الهائلة في توزيع الخبرات الطبية حول العالم. فبينما تتمركز الكفاءات الجراحية العليا في عواصم مثل لندن ونيويورك وطوكيو، تعاني قارات بأكملها من نقص حاد في الجراحين المتخصصين. تشير منظمة الصحة العالمية (WHO) إلى أن نحو 5 مليارات شخص حول العالم يفتقرون إلى الوصول الآمن للجراحة الأساسية. وفي هذا السياق تحديداً، تأتي تقنية الجراحة عبر القارات لتقدم حلاً لم يكن متخيلاً قبل عقدين فقط.
فقد أثبتت عملية حقيقية أُجريت في مطلع عام 2025 أن هذا الحلم أصبح واقعاً ملموساً. الدكتور فيبول باتيل (Vipul Patel)، أحد أبرز جراحي المسالك البولية في العالم، أجرى عملية جراحية ناجحة من مقره في فلوريدا الأمريكية لمريض يرقد في أنغولا الإفريقية. هذه العملية مثّلت نقطة تحول جوهرية، وهي المثال الواقعي الموازي تماماً لسيناريو “لندن – نيروبي” الذي نطرحه هنا.
اقرأ أيضاً: علم وظائف الأعضاء (Physiology): استكشاف آليات الحياة
ما هي الجراحة الروبوتية عن بعد؟ هل هي أكثر من مجرد “مكالمة فيديو” طبية؟
لنبدأ بتفكيك المصطلح. الجراحة الروبوتية عن بعد — أو ما يُعرف بالإنجليزية بـ Telesurgery — هي منظومة طبية تدمج بين علم الروبوتات (Robotics) وتقنيات الاتصالات المتقدمة (Advanced Telecommunications) لتمكين جراح من إجراء عملية على مريض موجود في موقع جغرافي مختلف تماماً. لا نتحدث هنا عن طبيب يعطي تعليمات عبر شاشة لزميل آخر يقف في غرفة العمليات. بل نتحدث عن تحكم مباشر وفعلي بأدوات جراحية حقيقية تلمس أنسجة المريض وتقطعها وتخيطها.
لكن ما الفرق الجوهري بين الجراحة الروبوتية العادية والجراحة عن بعد؟ في الجراحة الروبوتية التقليدية — مثل تلك التي يُستخدم فيها نظام دافنشي الجراحي (Da Vinci Surgical System) — يجلس الجراح على بعد أمتار قليلة من المريض في نفس غرفة العمليات. يتحكم بالروبوت عبر وحدة التحكم، لكنه يستطيع أن يقوم ويتدخل يدوياً في أي لحظة. على النقيض من ذلك، في الجراحة التليفونية عن بعد، يفصل بين الجراح والمريض محيطات وقارات. الجراح لا يستطيع التدخل اليدوي إطلاقاً. كل شيء يعتمد على جودة الاتصال ودقة الروبوت وسرعة نقل البيانات.
وهذا بالضبط ما يجعل هذه التقنية أكثر تعقيداً وأكثر إثارة في الوقت نفسه. إنها لا تتطلب فقط روبوتاً ذكياً، بل تتطلب بنية تحتية اتصالية خالية من الأخطاء، وبروتوكولات أمان صارمة، وفريقاً طبياً مساعداً في الموقع البعيد يتولى تحضير المريض والتعامل مع أي طارئ فيزيائي مباشر.
💡 معلومة سريعة
أول استخدام حقيقي لمصطلح “الجراحة التليفونية” (Telesurgery) ظهر في تسعينيات القرن الماضي ضمن أبحاث وكالة الفضاء الأمريكية ناسا (NASA)، التي كانت تبحث عن طريقة لإجراء عمليات جراحية لرواد الفضاء المتواجدين على متن محطة الفضاء الدولية دون الحاجة لإعادتهم إلى الأرض.
المصدر: وكالة الفضاء الأمريكية (NASA) — Telemedicine and Surgical Robotics for Space Exploration
| معيار المقارنة | الجراحة الروبوتية التقليدية | الجراحة الروبوتية عن بُعد (Telesurgery) |
|---|---|---|
| موقع الجراح | في نفس غرفة العمليات (أمتار قليلة) | في موقع جغرافي مختلف (آلاف الكيلومترات) |
| التدخل اليدوي المباشر | ممكن في أي لحظة | غير ممكن — يعتمد كلياً على الروبوت |
| الاعتماد على الاتصال | محدود (شبكة محلية داخلية) | كلّي (ألياف ضوئية + شبكات 5G) |
| خطورة زمن الوصول (Latency) | شبه معدومة (أقل من 1 ms) | عالية — يجب أن تبقى أقل من 200 ms |
| الحاجة لفريق محلي مساعد | فريق جراحي كامل حاضر | فريق تمريض وتخدير مدرب + جراح احتياطي |
| متطلبات الأمن السيبراني | أساسية | متقدمة جداً (تشفير + شبكات خاصة) |
| مثال على النظام المستخدم | نظام دافنشي (Da Vinci System) | نظام RAVEN / أنظمة مخصصة |
| المصادر: Nature — Transatlantic Robot-Assisted Telesurgery (2002) | International Journal of Robotics Research — The RAVEN System (2009) | ||
كيف يجري طبيب في لندن عملية في نيروبي؟ ما التشريح التقني لهذه العملية المذهلة؟
هنا ندخل في صلب الموضوع. لنفهم كيف تتم العمليات الجراحية عن بعد فعلياً، يجب أن نفهم ثلاث حلقات مترابطة تشكل سلسلة واحدة لا تحتمل أي خلل في أي حلقة منها.
وحدة التحكم: كيف تتحول حركة الإصبع إلى أمر رقمي؟
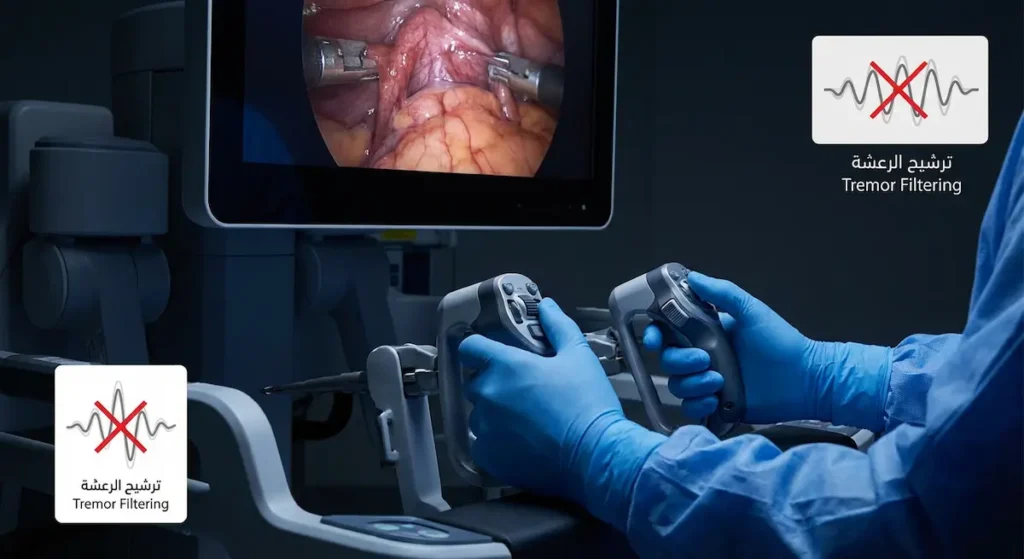
كل شيء يبدأ من وحدة التحكم (Surgeon Console). هذه الوحدة هي المكان الذي يجلس فيه الجراح في لندن. تبدو مثل محطة عمل متطورة مزودة بشاشة عرض مجسمة ثلاثية الأبعاد (3D Stereoscopic Display) تعرض صورة حية ومكبرة لموقع الجراحة داخل جسم المريض في نيروبي. أمام الجراح مقبضان يشبهان الملقط الجراحي، مزودان بمستشعرات فائقة الحساسية. عندما يحرك الجراح إصبعه بمقدار مليمتر واحد، تلتقط هذه المستشعرات الحركة وتحولها إلى إشارة رقمية (Digital Signal). هذه الإشارة تحمل معلومات دقيقة عن اتجاه الحركة، وقوة الضغط، وسرعة الانتقال، وزاوية الدوران.
لكن ليس هذا كل شيء. فقد صُممت وحدات التحكم الحديثة لتقوم بما يُسمى “ترشيح الرعشة” (Tremor Filtering). يد الإنسان ترتجف بشكل طبيعي — حتى لو كان الجراح أمهر جراح في العالم. هذه الرعشة الفسيولوجية الطبيعية تبلغ نحو 6 إلى 12 هرتز. النظام الذكي يكتشف هذه الاهتزازات ويزيلها تلقائياً قبل إرسال الإشارة، فيصل إلى الروبوت في نيروبي أمر “نظيف” تماماً خالٍ من أي ارتعاش بشري.
الطريق السريع للبيانات: كيف تسافر الإشارة من لندن إلى نيروبي؟
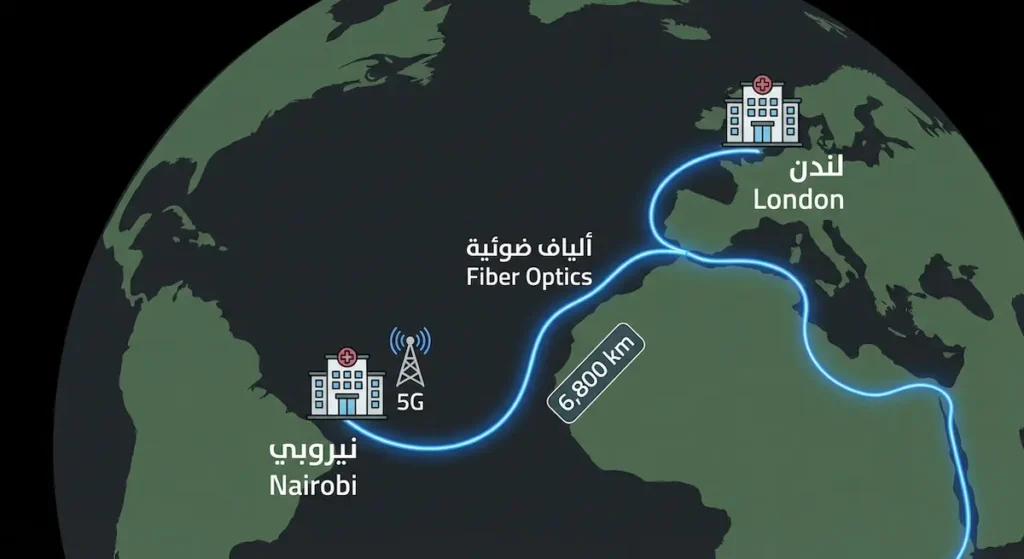
بعد أن تتحول حركة يد الجراح إلى إشارة رقمية، تحتاج هذه الإشارة إلى “طريق سريع” لتصل إلى الروبوت في نيروبي. هنا يأتي دور البنية التحتية للاتصالات، وتحديداً الألياف الضوئية (Fiber Optics) وشبكات الجيل الخامس 5G.
الألياف الضوئية تنقل البيانات بسرعة الضوء حرفياً — نحو 200,000 كيلومتر في الثانية داخل الألياف الزجاجية. المسافة بين لندن ونيروبي تبلغ نحو 6,800 كيلومتر. نظرياً، الإشارة تصل في أقل من 34 مللي ثانية. لكن الواقع أعقد من ذلك بكثير؛ إذ تمر الإشارة عبر محطات تقوية، ومحولات (Routers)، وأنظمة تشفير أمني، وكل محطة تضيف تأخيراً طفيفاً.
كما أن تقنية الجيل الخامس 5G في الطب تلعب دوراً محورياً هنا، خاصة في “الميل الأخير” — أي المسافة بين محطة الاتصال الأرضية والمستشفى في نيروبي. شبكات 5G توفر تأخيراً لا يتجاوز مللي ثانية واحدة (1 ms) في أفضل الظروف، مع عرض نطاق ترددي (Bandwidth) هائل يكفي لنقل فيديو ثلاثي الأبعاد عالي الوضوح في الوقت الحقيقي.
الروبوت المنفذ: كيف يستقبل الأمر ويحركه بدقة خارقة؟
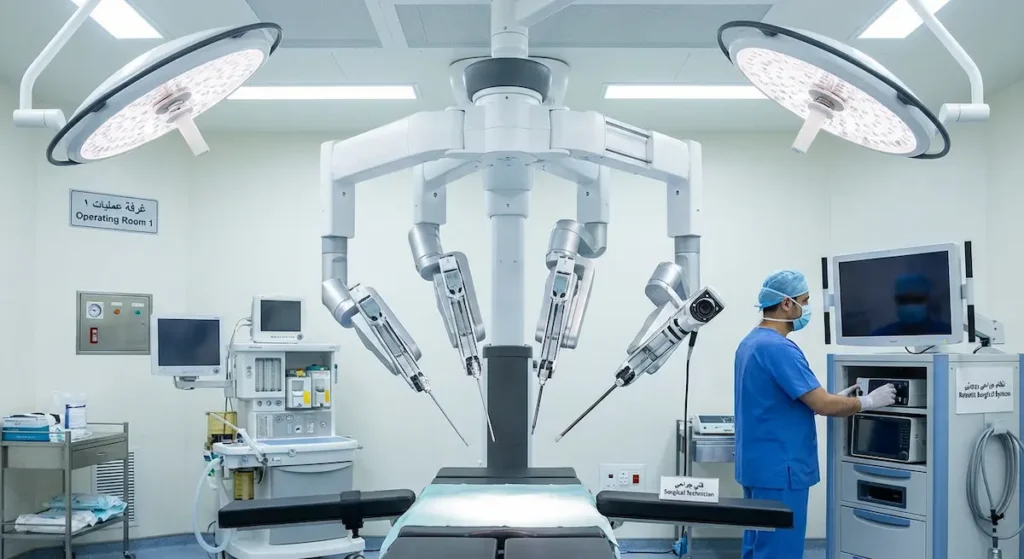
على الجانب الآخر من العالم، في غرفة العمليات بنيروبي، يقف الروبوت الجراحي — أو ما يُسمى في الأدبيات العلمية بـ “الروبوت التابع” (Slave Robot). هذا الروبوت مزود بأذرع ميكانيكية تحاكي حركة المعصم البشري، لكنها تتفوق عليه في عدة جوانب. فمعصم الإنسان يتحرك في 4 درجات حرية تقريباً، بينما أذرع الروبوتات الطبية الحديثة تتحرك في 7 درجات حرية (Degrees of Freedom)، مما يمنحها مرونة أكبر من يد الإنسان نفسها.
عندما تصل الإشارة الرقمية من لندن، تُفك شفرتها فوراً وتُترجم إلى حركة ميكانيكية دقيقة. الذراع الروبوتية تتحرك بدقة تصل إلى 0.1 مليمتر — أي عُشر المليمتر. هذا يعني أن الروبوت يستطيع التعامل مع أوعية دموية لا يتجاوز قطرها سُمك شعرة الرأس.
وبالتوازي، تلتقط كاميرا مثبتة على أحد أذرع الروبوت صورة مكبرة حتى 10 أضعاف لموقع الجراحة، وترسلها فوراً عبر نفس “الطريق السريع” إلى شاشة الجراح في لندن. وبالتالي يتشكل ما يمكن وصفه بـ “حلقة مغلقة” (Closed Loop): الجراح يرى، يتخذ قراراً، يحرك يده، الروبوت ينفذ، الكاميرا تُظهر النتيجة، والجراح يُعدّل حركته التالية بناءً على ما يراه.
🔬 حقيقة مدهشة
في عملية فلوريدا-أنغولا عام 2025، كان التأخير الكلي بين حركة يد الدكتور فيبول باتيل (Vipul Patel) في فلوريدا واستجابة الروبوت في أنغولا أقل من 200 مللي ثانية — أي أقل من خُمس ثانية. هذا الزمن أقصر من الوقت الذي تستغرقه لرمش عينك!
المصدر: IFLScience — Surgeon Performs Remote Robot Surgery Across an Ocean (2025)
اقرأ أيضاً: ما هو إنترنت الأشياء: وكيف يُغيّر حياتنا ومستقبلنا؟
| المعيار | يد الجراح البشرية | الذراع الروبوتية الجراحية |
|---|---|---|
| درجات الحرية (Degrees of Freedom) | 4 تقريباً | 7 |
| دقة الحركة | 1 – 2 mm | 0.1 mm (عُشر المليمتر) |
| الرعشة الفسيولوجية | موجودة (6 – 12 Hz) | معدومة (يُزيلها النظام تلقائياً) |
| تكبير الصورة | بالعين المجردة أو عدسات مكبرة بسيطة | حتى 10x عبر كاميرا ثلاثية الأبعاد |
| التعب والإرهاق | يتراكم مع مرور الوقت | ثبات أداء مستمر دون تعب |
| القدرة على العمل في مساحات ضيقة | محدودة بحجم اليد والأصابع | عالية جداً بفضل الأذرع الرفيعة المرنة |
| المصادر: International Journal of Robotics Research — RAVEN Design and Validation (2009) | Nature Machine Intelligence — Rise of Robots in Surgery (2020) | ||
لماذا يُعَدُّ “زمن الوصول” العدو الأول للجراح عن بُعد؟
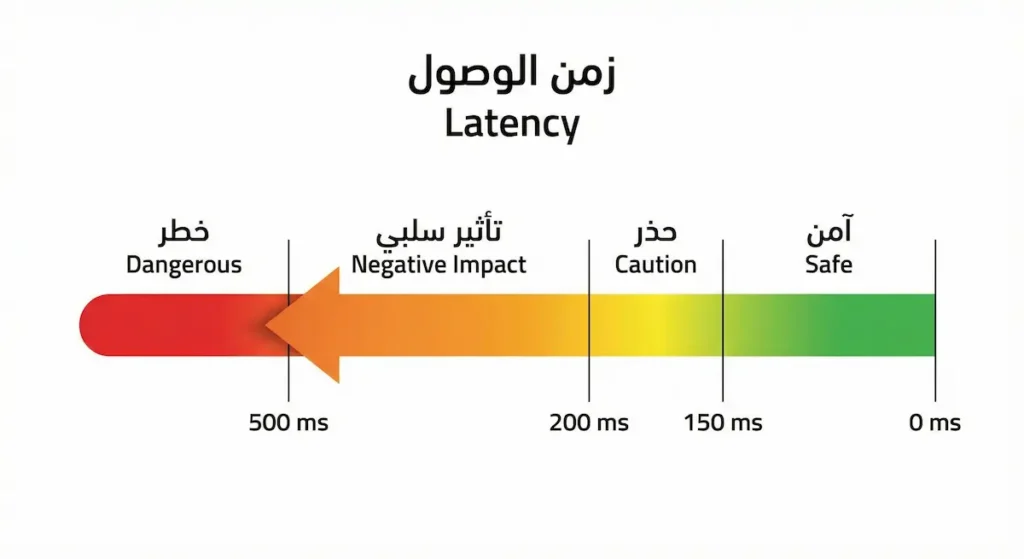
إذا كان هناك وحش واحد يهدد نجاح الجراحة الروبوتية عن بعد، فهو ليس عطلاً ميكانيكياً ولا خطأً بشرياً. إنه شيء غير مرئي تماماً: التأخير الزمني، أو ما يُعرف تقنياً بـ زمن الوصول (Latency).
ما هو زمن الوصول بالضبط؟ تخيل أنك تتحدث مع شخص عبر مكالمة فيديو دولية. أحياناً تلاحظ أن صوتك يصل متأخراً بجزء من الثانية، فيتداخل كلامكما. هذا التأخير مزعج في المكالمة العادية، لكنه في الجراحة قد يكون قاتلاً. إذا ضغط الجراح في لندن على وعاء دموي نازف وتأخر تنفيذ الأمر لثانية واحدة فقط، فقد يفقد المريض في نيروبي كمية دم كبيرة.
لقد أثبتت دراسة منشورة في مجلة Annals of Surgery عام 2020 أن التأخير الذي يتجاوز 200 مللي ثانية يبدأ في التأثير سلبياً على أداء الجراح، ويزيد من احتمال ارتكاب أخطاء حركية. وعندما يتجاوز التأخير 500 مللي ثانية — أي نصف ثانية — يصبح الإجراء الجراحي خطيراً فعلاً. الجراح يفقد الإحساس بـ “التزامن” بين يده والروبوت، ويشعر وكأنه يقود سيارة بعجلة قيادة “متراخية”.
فكيف تغلبت التقنيات الحديثة على هذا العدو؟ الإجابة تكمن في عدة حلول متكاملة:
- الحوسبة الطرفية (Edge Computing): بدلاً من إرسال البيانات إلى خوادم مركزية بعيدة لمعالجتها ثم إعادتها، تُعالج البيانات في خوادم محلية قريبة جداً من موقع الروبوت. هذا يختصر زمن المعالجة بشكل كبير.
- بروتوكولات الاتصال المخصصة: طُورت بروتوكولات نقل بيانات خاصة بالتطبيقات الطبية تعطي الأولوية القصوى لحزم البيانات الجراحية على أي بيانات أخرى تمر عبر الشبكة.
- الخطوط المخصصة (Dedicated Lines): في بعض العمليات، يُحجز خط ألياف ضوئية كامل حصرياً للعملية الجراحية، دون مشاركته مع أي استخدام إنترنت آخر.
- خوارزميات التنبؤ (Predictive Algorithms): هذه خوارزميات ذكية تتنبأ بالحركة التالية ليد الجراح بناءً على نمط حركته السابق. إذا حدث تأخير طفيف في الإشارة، يستطيع الروبوت “تخمين” الحركة التالية والاستمرار بسلاسة حتى تصل الإشارة الحقيقية.
⚡ لمحة تقنية
سرعة الضوء في الفراغ تبلغ 299,792 km/s. لكن داخل الألياف الضوئية، تنخفض السرعة إلى نحو 200,000 km/s بسبب معامل الانكسار. ورغم أن هذا يبدو سريعاً بشكل مذهل، إلا أن كل مللي ثانية إضافية ناتجة عن محطات التقوية والمعالجة تُحسب بدقة في عمليات الجراحة عبر القارات.
المصدر: Annals of Surgery — The Impact of Latency on Surgical Performance in Teleoperation (2005)
اقرأ أيضاً: معدل البت (Bitrate): الأهمية، القياس، ودوره في جودة الوسائط
| الحل التقني | آلية العمل | مقدار تقليل التأخير |
|---|---|---|
| الحوسبة الطرفية (Edge Computing) | معالجة البيانات في خوادم محلية قريبة من الروبوت بدلاً من خوادم مركزية بعيدة | يختصر زمن المعالجة بنسبة تصل إلى 50% |
| بروتوكولات الاتصال المخصصة | إعطاء الأولوية القصوى لحزم البيانات الجراحية على أي بيانات أخرى في الشبكة | يمنع التأخير الناتج عن ازدحام الشبكة |
| الخطوط المخصصة (Dedicated Lines) | حجز خط ألياف ضوئية كامل حصرياً للعملية الجراحية | يضمن أقل تأخير ممكن فيزيائياً |
| خوارزميات التنبؤ (Predictive Algorithms) | تتنبأ بالحركة التالية ليد الجراح بناءً على نمط حركته السابق وتنفذها استباقياً | يعوّض تأخيراً يصل إلى 50 – 100 ms |
| شبكات الجيل الخامس 5G | توفر تأخيراً لا يتجاوز 1 ms في “الميل الأخير” بين محطة الاتصال والمستشفى | يقلل التأخير في المرحلة الأخيرة بنسبة تفوق 90% |
| المصادر: Annals of Surgery — Impact of Latency on Surgical Performance (2005) | BioMedical Engineering OnLine — Medical Telerobotic Systems (2016) | ||
من “عملية لندبرغ” إلى “معجزة أنغولا”: كيف تحول المستحيل إلى ممكن؟
لفهم أين وصلنا اليوم، يجب أن نعود إلى البداية. وهي بداية جريئة ومثيرة للدهشة.
في السابع من سبتمبر عام 2001، جلس الجراح الفرنسي جاك مارسكو (Jacques Marescaux) في مبنى بنيويورك الأمريكية، وأجرى عملية استئصال مرارة لمريضة تبلغ من العمر 68 عاماً كانت ترقد في مستشفى بمدينة ستراسبورغ الفرنسية — على بعد 6,230 كيلومتراً عبر المحيط الأطلسي. سُميت هذه العملية بـ “عملية لندبرغ” (Operation Lindbergh) تيمناً بالطيار تشارلز لندبرغ الذي كان أول من عبر الأطلسي بطائرة بلا توقف.
كانت العملية ناجحة. لكنها كانت مكلفة بشكل مرعب. احتاجت إلى حجز خط ألياف ضوئية مخصص عبر المحيط الأطلسي بتكلفة تجاوزت مليون دولار. وكان التأخير الزمني يتراوح بين 155 و 200 مللي ثانية — وهو رقم كان يعتبر على حافة الخطر آنذاك. ومع ذلك، أثبتت هذه العملية أن المفهوم ممكن علمياً. لقد فتحت الباب أمام حقبة جديدة.
لكن ما حدث بعدها كان مخيباً للآمال بعض الشيء. لمدة تقارب عقدين من الزمن، لم تتكرر عمليات مماثلة على نطاق واسع. السبب بسيط: البنية التحتية للاتصالات لم تكن جاهزة. تكلفة حجز خطوط مخصصة كانت خيالية. كما أن سرعات الإنترنت في معظم دول العالم — وخاصة الدول النامية — لم تكن تسمح بنقل بيانات الفيديو الجراحي عالي الدقة في الوقت الحقيقي.
ثم جاء عام 2025 ليغير كل شيء.
الدكتور فيبول باتيل، أحد أشهر جراحي المسالك البولية الروبوتية في العالم والمقيم في فلوريدا، أجرى عملية جراحية ناجحة لمريض في أنغولا باستخدام الجيل الأحدث من الروبوتات الجراحية. ما جعل هذه العملية مختلفة عن عملية لندبرغ هو عدة عوامل: تكلفة الاتصال انخفضت بشكل هائل بفضل انتشار كابلات الألياف الضوئية تحت البحرية. تقنية الجيل الخامس 5G في الطب وفرت سرعات اتصال غير مسبوقة. الروبوتات الجراحية أصبحت أصغر حجماً وأكثر دقة وأقل تكلفة. وأنظمة الذكاء الاصطناعي أصبحت قادرة على تعويض أي تأخير طفيف في الإشارة.
هذه العملية لم تكن مجرد إنجاز تقني. كانت رسالة واضحة: مستقبل الطب الاتصالي في المناطق النائية لم يعد خيالاً. إنه يحدث الآن.
📌 هل تعلم؟
عملية لندبرغ عام 2001 استغرقت 54 دقيقة فقط، لكن التحضير التقني لها استغرق أكثر من عامين كاملين من التنسيق بين فريقين طبيين على جانبي المحيط الأطلسي، وشركة اتصالات فرنسية خصصت خطاً ضوئياً كاملاً للعملية.
المصدر: Nature — Transatlantic Robot-Assisted Telesurgery, Marescaux et al. (2002)
| العام | الحدث | المسافة | زمن الوصول (Latency) | الأهمية |
|---|---|---|---|---|
| 2001 | عملية لندبرغ (Operation Lindbergh) — نيويورك إلى ستراسبورغ | 6,230 km | 155 – 200 ms | أول جراحة عن بُعد عابرة للمحيط في التاريخ |
| 2005 – 2019 | تجارب محدودة ومخبرية — ركود نسبي بسبب ضعف البنية التحتية | متنوعة | متفاوت | إثبات المفهوم دون تطبيق سريري واسع |
| 2019 | أول جراحة عن بُعد باستخدام 5G في الصين (على حيوان تجريبي) | ~50 km | < 20 ms | إثبات جدوى شبكات 5G في الجراحة عن بُعد |
| 2024 | جراحة روبوتية صينية عن بُعد على حيوان تجريبي عبر 5G فقط | 3,000 km | < 100 ms | إثبات إمكانية الاستغناء عن الألياف الضوئية المخصصة |
| 2025 | عملية فلوريدا-أنغولا — الدكتور فيبول باتيل (Vipul Patel) | ~10,000 km | < 200 ms | أول جراحة سريرية ناجحة عابرة للقارات منذ عملية لندبرغ |
| المصادر: Nature — Transatlantic Robot-Assisted Telesurgery (2002) | IFLScience — Remote Robot Surgery Across an Ocean (2025) | Nature Machine Intelligence (2020) | ||||
كيف “يشعر” الطبيب في لندن بأنسجة المريض في نيروبي؟
هذا هو السؤال الذي يطرحه كل من يسمع عن الجراحة الروبوتية عن بعد لأول مرة. وهو سؤال وجيه تماماً. الجراح التقليدي يعتمد بشكل كبير على حاسة اللمس أثناء العملية. يشعر بقساوة الورم مقارنة بليونة النسيج السليم. يحس بنبض الشريان تحت أصابعه. يميز بين الغضروف والعظم بمجرد الضغط. فكيف يمكن لجراح يبعد آلاف الكيلومترات أن “يلمس” ما يلمسه الروبوت؟
الإجابة تكمن في تقنية ردود الفعل اللمسية (Haptic Feedback). هذه التقنية تعمل من خلال مستشعرات ضغط فائقة الحساسية مثبتة على أطراف أذرع الروبوت في نيروبي. عندما يلامس المشرط الروبوتي نسيجاً رخواً، يسجل المستشعر مقدار المقاومة ويرسل هذه البيانات فوراً إلى مقبضي التحكم في يد الجراح بلندن. المقابض تهتز أو تقاوم حركة يد الجراح بنسبة تتناسب مع ما يواجهه الروبوت.
تخيل الأمر هكذا: إذا اصطدم المشرط بعظم قاسٍ، يشعر الجراح بمقاومة شديدة في المقبض — كأنه هو من اصطدم بالعظم فعلاً. وإذا كان النسيج لَيّناً ورخواً، ينزلق المقبض بسلاسة تحت أصابعه. هذا الإحساس ليس مثالياً بعد — يعترف المتخصصون بأن تقنية ردود الفعل اللمسية لا تزال في مراحلها الأولى مقارنة بحاسة اللمس البشرية الطبيعية. لكنها تتطور بسرعة مذهلة.
لقد أثبتت دراسة منشورة في مجلة IEEE Transactions on Haptics عام 2022 أن إضافة تقنية ردود الفعل اللمسية إلى الروبوتات الجراحية قللت من القوة المفرطة التي يطبقها الجراح على الأنسجة بنسبة تصل إلى 30%، مما خفّض احتمال تمزق الأنسجة الرقيقة بشكل ملحوظ. هذا يعني أن المريض في نيروبي لا يحصل فقط على نفس مستوى الجراحة المتاح في لندن، بل قد يحصل على مستوى أكثر أماناً بفضل إزالة عامل “الرعشة البشرية” ووضع حدود رقمية للقوة المطبقة.
ومن الابتكارات الحديثة في هذا المجال ما يُعرف بـ “الواقع المعزز اللمسي” (Haptic Augmented Reality)، وهو نظام يدمج بيانات الأشعة المقطعية (CT Scan) والرنين المغناطيسي (MRI) مع الصورة الحية أثناء الجراحة، ليعرض للجراح “خريطة ألوان” تشير إلى كثافة الأنسجة. النسيج الخطير (كالشريان الرئيس) يظهر باللون الأحمر، بينما يظهر النسيج الآمن باللون الأخضر. هذه الطبقة البصرية تعوض جزئياً عن محدودية اللمس عن بعد.
اقرأ أيضاً: الخلايا العصبية: كيف تعمل وما أنواعها ووظائفها في جسم الإنسان؟
ما التحديات والمخاطر التي تمنع انتشار هذه التقنية في كل مستشفى؟
رغم كل ما ذكرناه من إنجازات مبهرة، فإن مخاطر الجراحة الروبوتية عبر الإنترنت حقيقية ولا يمكن تجاهلها. دعونا نواجه الواقع بصراحة.
التهديد السيبراني: ماذا لو اخترق قرصان الروبوت أثناء العملية؟

هذا ليس سيناريو خيالياً من أفلام هوليوود. تحديات الأمن السيبراني في الطب تُعَدُّ من أخطر العقبات أمام انتشار الجراحة عن بعد. في عام 2015، نشر باحثون من جامعة واشنطن دراسة أثبتوا فيها أنهم تمكنوا من اختراق روبوت جراحي يعمل عبر الإنترنت وتغيير أوامره الحركية عن بعد. لم يكن هذا على مريض حقيقي — بل كان تجربة مخبرية — لكن الرسالة كانت واضحة ومرعبة.
تخيل أن قرصاناً إلكترونياً (Hacker) يتمكن من التدخل في الإشارات بين وحدة التحكم في لندن والروبوت في نيروبي. قد يغير اتجاه حركة المشرط، أو يزيد الضغط المطبق، أو يوقف الروبوت تماماً في لحظة حرجة. الحل يكمن في التشفير من طرف إلى طرف (End-to-End Encryption) واستخدام شبكات خاصة افتراضية طبية (Medical VPNs) مع بروتوكولات مصادقة متعددة المراحل. لكن لا يوجد نظام أمني مثالي بنسبة 100%.
اقرأ أيضاً: الجدار الناري وأجهزة الحماية من الفيروسات: أساسيات الأمن السيبراني
التكلفة الباهظة: هل تستطيع المستشفيات تحمل هذا العبء؟
تكلفة الجراحة الروبوتية عن بعد لا تزال مرتفعة بشكل يجعلها بعيدة عن متناول معظم المستشفيات في العالم النامي — وهي المناطق التي تحتاج إليها أكثر من غيرها. سعر نظام دافنشي الجراحي وحده يتراوح بين 1.5 و 2.5 مليون دولار أمريكي. أضف إلى ذلك تكلفة البنية التحتية للاتصالات، وتدريب الفريق الطبي المساعد، وصيانة الروبوت، وأقساط التأمين ضد الأخطاء. المجموع الكلي قد يتجاوز 5 ملايين دولار لإنشاء محطة جراحة عن بعد واحدة.
بالمقابل، هناك مبادرات واعدة لتخفيض التكاليف. شركات ناشئة مثل CMR Surgical البريطانية طورت روبوتات جراحية أصغر حجماً وأقل تكلفة بكثير من نظام دافنشي. ومن جهة ثانية، بدأت بعض الحكومات والمنظمات الدولية في دعم مشاريع نقل تقنيات الجراحة الروبوتية إلى الدول النامية كجزء من برامج المساعدة الصحية.
المسؤولية القانونية: من يتحمل اللوم إذا حدث خطأ؟
هذا هو “اللغز القانوني” الأكبر. إذا أخطأ الروبوت أثناء العملية وتضرر المريض في نيروبي، فمن المسؤول قانونياً؟ هل هو الجراح في لندن لأنه كان يتحكم بالروبوت؟ أم المستشفى في نيروبي لأن المريض يرقد في عنايتها؟ أم شركة الاتصالات لأن التأخير في شبكتها ربما سبب الخطأ؟ أم الشركة المصنعة للروبوت لأن خللاً تقنياً ربما حدث في برمجيته؟
حتى الآن، لا يوجد إطار قانوني دولي موحد يحكم هذه المسألة. كل دولة تطبق قوانينها المحلية، وهذا يخلق فوضى قانونية حقيقية. في بريطانيا مثلاً، يخضع الجراح لقوانين الممارسة الطبية البريطانية. لكن المريض في كينيا يحميه القانون الكيني. فأي قانون يُطبق عند النزاع؟ بالإضافة إلى ذلك، لا تغطي معظم وثائق التأمين الطبي الحالية العمليات الجراحية العابرة للحدود.
لقد أشارت ورقة بحثية منشورة في مجلة Journal of Medical Internet Research عام 2023 إلى أن الفراغ التشريعي يُعَدُّ العائق الأكبر أمام التبني الواسع لتقنية الجراحة عبر القارات، وأوصت بضرورة صياغة اتفاقيات دولية مشابهة لاتفاقيات الطيران المدني الدولية تحدد المسؤوليات بوضوح.
📋 معلومة تستحق التأمل
في عام 2023، أصدرت إدارة الغذاء والدواء الأمريكية (FDA) مسودة إرشادات جديدة حول تنظيم الروبوتات الجراحية المتصلة بالإنترنت، وطلبت من الشركات المصنعة تقديم خطط شاملة للأمن السيبراني كشرط للموافقة على تسويق أجهزتها.
المصدر: إدارة الغذاء والدواء الأمريكية (FDA) — Cybersecurity in Medical Devices (2023)
اقرأ أيضاً: كيفية حماية البيانات الشخصية على الإنترنت: كيف تحمي خصوصيتك الرقمية؟
| التحدي | مستوى الخطورة | الوضع الحالي | الحل المقترح |
|---|---|---|---|
| الأمن السيبراني | حرج | أُثبت اختراق روبوت جراحي مخبرياً عام 2015 | تشفير من طرف إلى طرف + شبكات VPN طبية |
| التكلفة المرتفعة | مرتفع | محطة واحدة قد تتجاوز $5,000,000 | روبوتات أصغر وأرخص + دعم حكومي ودولي |
| الفراغ القانوني | حرج | لا يوجد إطار قانوني دولي موحد | اتفاقيات دولية مشابهة لاتفاقيات الطيران المدني |
| زمن الوصول (Latency) | مرتفع | انخفض إلى أقل من 200 ms في أفضل الظروف | حوسبة طرفية + خوارزميات تنبؤ + 5G |
| التقبل الثقافي والنفسي | متوسط | مقاومة نفسية لدى المرضى لفكرة جراح غائب جسدياً | حملات توعية مجتمعية وإعلامية مدروسة |
| المصادر: جامعة واشنطن — Cyber Security Threats Against Teleoperated Surgical Robots (2015) | إدارة الغذاء والدواء الأمريكية (FDA) — Cybersecurity in Medical Devices (2023) | BioMedical Engineering OnLine (2016) | |||
ماذا عن الواقع العربي والسعودي؟ هل نحن مستعدون لهذه القفزة؟
لا يمكن الحديث عن مستقبل الجراحة الروبوتية عن بعد دون التطرق للواقع العربي، وتحديداً المملكة العربية السعودية التي تشهد طفرة غير مسبوقة في قطاع الصحة الرقمية ضمن رؤية 2030.
المملكة العربية السعودية تملك بالفعل عدة أنظمة روبوتية جراحية متقدمة. مستشفى الملك فيصل التخصصي ومركز الأبحاث في الرياض يُعَدُّ من أوائل المراكز في المنطقة التي اعتمدت نظام دافنشي الجراحي لإجراء عمليات المسالك البولية وأمراض النساء. كما أن مدينة الملك عبدالعزيز الطبية أجرت مئات العمليات الروبوتية منذ عام 2018. لكن كل هذه العمليات تمت بوجود الجراح في نفس المبنى.
الخطوة التالية — الجراحة عن بعد — تتطلب بنية تحتية اتصالية متطورة. وهنا تبرز نقطة قوة سعودية مهمة: انتشار شبكات 5G. المملكة من أوائل الدول العربية التي أطلقت شبكات الجيل الخامس تجارياً، وتغطيتها تتوسع بسرعة. هذا يجعل المملكة مرشحة قوية لاستضافة تجارب أولى في الجراحة عن بعد على المستوى الإقليمي.
من ناحية أخرى، يظل هناك قلق مشروع لدى المرضى السعوديين — وفي العالم العربي عموماً — بشأن الثقة في هذه التقنية. الثقافة الطبية العربية تميل إلى تفضيل الجراح “الحاضر جسدياً” في غرفة العمليات. فكرة أن يجري عليك عملية جراح لا تراه ولا يراك بعينيه المجردة قد تثير مخاوف نفسية حقيقية. وعليه فإن دور التوعية المجتمعية والإعلامية يصبح بالغ الأهمية لتقبل هذه التقنية.
ومما يستحق الذكر أن مجلس الضمان الصحي السعودي بدأ فعلاً في دراسة الأطر التنظيمية لتقنيات الطب عن بعد (Telemedicine)، وإن كانت اللوائح الحالية لا تتناول تحديداً الجراحة الروبوتية العابرة للحدود. هذه فجوة تشريعية تحتاج إلى معالجة عاجلة قبل أن تصبح التقنية واقعاً يومياً.
اقرأ أيضاً: الاقتصاد السعودي: كيف تحول من الاعتماد على النفط إلى التنويع الشامل؟
مثال تطبيقي: كيف يمكن أن تنقذ هذه التقنية حياة مريض في قرية نائية؟
دعني أسرد لك سيناريو واقعياً يوضح القيمة الحقيقية لهذه التقنية.
أحمد، مزارع يبلغ 55 عاماً، يعيش في قرية صغيرة بمنطقة نجران جنوب السعودية. يُشخَّص بورم في الكلية يحتاج إلى استئصال جزئي دقيق (Partial Nephrectomy). أقرب جراح متخصص في هذا النوع من العمليات الروبوتية يعمل في مستشفى الملك فيصل التخصصي بالرياض — على بعد أكثر من 900 كيلومتر. حالة أحمد الصحية لا تسمح بسفر طويل. نقله بالإسعاف الجوي مكلف ومحفوف بالمخاطر.
في سيناريو الجراحة عن بعد: يُحضَّر أحمد في المستشفى المحلي بنجران، الذي يتوفر فيه روبوت جراحي وفريق تمريض مدرب. الجراح المتخصص في الرياض يجلس أمام وحدة التحكم ويجري العملية عن بعد. فريق نجران يتولى التخدير ومراقبة العلامات الحيوية والتعامل مع أي طارئ فيزيائي مباشر. العملية تستغرق ساعتين. أحمد يستيقظ في مستشفاه المحلي، محاطاً بعائلته، دون أن يضطر إلى مغادرة مدينته.
هذا السيناريو ليس خيالاً. إنه التطبيق المنتظر الذي يعمل عليه باحثون ومهندسون حول العالم الآن. والسؤال ليس “هل سيحدث؟”، بل “متى سيصبح روتينياً؟”.
🧪 أغرب معلومة في هذا المقال
في عام 2024، أجرى فريق بحثي صيني عملية جراحية روبوتية عن بُعد على حيوان تجريبي من مسافة 3,000 كيلومتر باستخدام شبكة 5G فقط — دون أي ألياف ضوئية مخصصة. التأخير الكلي لم يتجاوز 100 ms. هذا يعني أن الجيل التالي من الجراحات عن بُعد قد لا يحتاج حتى إلى بنية تحتية ضوئية باهظة.
المصدر: Nature Machine Intelligence — Rise of Robots in Surgical Environments (2020)
كيف سيُغير الذكاء الاصطناعي مستقبل الجراحة عن بعد؟

إذا كانت الجراحة الروبوتية عن بعد اليوم تعتمد بالكامل على الجراح البشري الذي يتحكم بالروبوت عن بعد، فإن المستقبل يحمل شيئاً أكثر إثارة — ربما أكثر إثارة للقلق أيضاً. الذكاء الاصطناعي (Artificial Intelligence) بدأ يدخل غرفة العمليات ليس كبديل للجراح، بل كشريك ذكي.
فهل يا ترى ستغني الروبوتات عن الجراحين؟ الإجابة القصيرة: لا، ليس في المدى المنظور. لكن الإجابة الأدق: الذكاء الاصطناعي سيجعل الجراح أفضل مما يمكنه أن يكون وحده. إليك كيف:
تصحيح الأخطاء الآنية: يستطيع نظام الذكاء الاصطناعي مراقبة حركات الجراح في الوقت الحقيقي ومقارنتها بقاعدة بيانات تضم ملايين الحركات الجراحية الناجحة. إذا اكتشف أن الجراح على وشك ارتكاب حركة “خارج النمط الآمن”، يُصدر تحذيراً فورياً أو يمنع الحركة تلقائياً.
التعامل مع انقطاع الاتصال: هذه هي المعضلة الأخطر في الجراحة عن بعد. ماذا يحدث إذا انقطع الاتصال بين لندن ونيروبي لثوانٍ معدودة أثناء العملية؟ في الأنظمة الحالية، يتجمد الروبوت فوراً وينتظر عودة الإشارة. لكن الأنظمة المستقبلية المدعومة بالذكاء الاصطناعي ستكون قادرة على إكمال “الخطوة الحالية” — مثل إنهاء غرزة جراحية بدأها الجراح — بشكل مستقل حتى يعود الاتصال. هذا ما يُسمى بـ “الاستقلالية الجزئية” (Partial Autonomy).
التخطيط الجراحي المسبق: قبل العملية، يستطيع الذكاء الاصطناعي تحليل صور الأشعة والرنين المغناطيسي للمريض في نيروبي، وإنشاء “خريطة جراحية ثلاثية الأبعاد” (3D Surgical Map) تحدد المسار الأمثل للمشرط وتُحذر من المناطق الخطرة (كموقع الشرايين الكبرى).
ومن المتوقع أن يشهد العقد القادم (2025-2035) دمجاً متزايداً بين الجراحة الروبوتية عن بعد والذكاء الاصطناعي وتقنيات الواقع المعزز (Augmented Reality)، مما سيجعل هذه العمليات أكثر أماناً وأقل اعتماداً على جودة الاتصال.
اقرأ أيضاً: تطبيقات الذكاء الاصطناعي في علم الأدوية: التحديات والفرص
نصائح عملية: ما الذي يجب أن تعرفه كمريض أو كطالب طب؟
بعد كل هذا الغوص التقني، دعني أقدم بعض النقاط العملية المهمة:
إذا عُرض عليك إجراء عملية جراحية روبوتية عن بعد، فإن أول سؤال يجب أن تسأله هو: ما مستوى التأخير الزمني (Latency) المتوقع أثناء العملية؟ أي رقم يتجاوز 200 مللي ثانية يستدعي مناقشة جدية مع الفريق الطبي. السؤال الثاني: هل يوجد جراح مؤهل في الموقع (أي بجانبك فعلياً) يمكنه التدخل يدوياً في حال حدوث أي طارئ تقني؟ وجود هذا “الجراح الاحتياطي” يُعَدُّ إجراء أمان أساسياً لا غنى عنه في المرحلة الحالية.
أما إذا كنت طالب طب مهتماً بهذا المجال، فاعلم أن الجراحين المستقبليين لن يحتاجوا فقط إلى مهارات جراحية تقليدية، بل سيحتاجون أيضاً إلى فهم عميق لعلوم الروبوتات وهندسة الاتصالات وأساسيات الذكاء الاصطناعي. الجامعات الرائدة بدأت بالفعل في تقديم برامج تدريبية متكاملة تجمع بين الجراحة والهندسة الروبوتية.
🎓 معلومة مفيدة للطلاب
جامعة جونز هوبكنز (Johns Hopkins University) الأمريكية تُعَدُّ من أوائل الجامعات التي أسست مختبراً متخصصاً في الجراحة الروبوتية عن بُعد (Telerobotic Surgery Lab)، ويقدم دورات مفتوحة عبر الإنترنت يمكن لأي طالب طب في العالم الالتحاق بها.
المصدر: Johns Hopkins University — Laboratory for Computational Sensing and Robotics (LCSR)
اقرأ أيضاً: علم الأمراض (Pathology): دراسة الأمراض وتأثيرها على الجسم
الأسئلة الشائعة حول الجراحة الروبوتية عن بُعد
إجابات مختصرة عن أكثر ما يسأله الناس
🧠 اختبر معلوماتك
ما الحد الأقصى لزمن الوصول (Latency) الذي يمكن تجاوزه قبل أن يبدأ التأثير السلبي على أداء الجراح في الجراحة الروبوتية عن بُعد؟
نهاية المسافات في الطب: هل نحن أمام ثورة حقيقية أم مجرد ضجة إعلامية؟
ها قد وصلنا إلى نهاية هذه الرحلة عبر غرف عمليات لا تعرف الحدود الجغرافية. لقد رأينا كيف أن جراحاً في لندن يستطيع — بكل ما تحمله الكلمة من معنى — أن يُدخل مشرطاً في جسد مريض بنيروبي ويخيط جرحه ويغادر غرفة العمليات الافتراضية وهو مطمئن. رأينا كيف أن التأخير الزمني الذي كان كابوساً قبل عقدين انخفض إلى أرقام لا تتجاوز رمشة العين. ورأينا كيف أن الذكاء الاصطناعي يستعد ليكون “المساعد الأذكى” الذي لا يتعب ولا يرتجف ولا ينسى.
لكن لنكن واقعيين أيضاً. هذه التقنية لا تزال في مراحلها الأولى. التكلفة مرتفعة. البنية التحتية غير متوفرة في معظم دول العالم. الأطر القانونية غائبة. ومخاطر الأمن السيبراني في الطب حقيقية وليست نظرية. كما أن المريض في نيروبي — أو في نجران أو في أي قرية نائية — يحتاج أولاً إلى فريق طبي محلي مدرب يُحضّره للعملية ويتابع حالته بعدها. الروبوت لا يستطيع أن يربت على كتف المريض المرتعب قبل العملية، ولا أن يمسك بيده عند الاستيقاظ.
المريض في نيروبي الذي حلمنا به في بداية هذا المقال يستطيع اليوم — نظرياً — أن يحصل على نفس جودة الجراحة المتاحة في أرقى مستشفيات لندن أو “مايو كلينك” (Mayo Clinic) دون تذكرة طائرة. التكنولوجيا ألغت الجغرافيا طبياً — أو على الأقل بدأت في ذلك. ما يبقى هو الإرادة السياسية، والاستثمار المالي، والتشريعات الذكية التي تجعل هذا الحلم في متناول كل مريض يحتاجه.
السؤال الذي أتركك معه: إذا كانت التكنولوجيا قادرة على نقل مشرط الجراح عبر القارات، فهل نحن مستعدون — ثقافياً وقانونياً وأخلاقياً — لتقبّل فكرة أن يُجري عليك عملية جراحية طبيب لم تقابله وجهاً لوجه قط؟
إذا وجدت هذا المقال مفيداً، شاركه مع من يهمه مستقبل الطب الرقمي — سواء كان طالب طب أو مريضاً يبحث عن خيارات، أو حتى مهندساً يعمل في مجال الاتصالات ولا يدري أن عمله قد ينقذ حياة إنسان في قارة أخرى. وإذا كنت ممارساً صحياً أو باحثاً، تابع أحدث الدراسات في هذا المجال لأن المشهد يتغير بسرعة مذهلة.
قاموس المصطلحات العلمية والتقنية
مصطلحات الروبوتات والأنظمة الجراحية
1. الجراحة الروبوتية عن بُعد (Telesurgery)
التعريف: إجراء طبي جراحي يتحكم فيه الجراح بروبوت جراحي موجود في موقع جغرافي بعيد عبر شبكات اتصال رقمية فائقة السرعة، دون أن يكون الجراح حاضراً جسدياً في غرفة العمليات.
2. نظام دافنشي الجراحي (Da Vinci Surgical System)
التعريف: أشهر منصة روبوتية جراحية في العالم، تتيح للجراح إجراء عمليات طفيفة التوغل عبر وحدة تحكم مزودة بشاشة ثلاثية الأبعاد ومقابض دقيقة. يتراوح سعره بين 1.5 و2.5 مليون دولار.
3. الروبوت التابع (Slave Robot)
التعريف: الوحدة الروبوتية الموجودة في موقع المريض البعيد، التي تستقبل الأوامر الرقمية من وحدة تحكم الجراح وتترجمها إلى حركات ميكانيكية جراحية دقيقة.
تبسيط: تخيله كـ “يد بديلة” للجراح تعمل بالتحكم عن بُعد — مثل طائرة مسيّرة يتحكم بها طيار من غرفة بعيدة.
4. وحدة التحكم الجراحية (Surgeon Console)
التعريف: محطة العمل التي يجلس أمامها الجراح وتضم شاشة عرض مجسمة ثلاثية الأبعاد ومقبضي تحكم مزودين بمستشعرات فائقة الحساسية لالتقاط حركات يديه وتحويلها إلى أوامر رقمية.
5. درجات الحرية (Degrees of Freedom)
التعريف: عدد المحاور المستقلة التي يمكن للذراع الروبوتية أن تتحرك عليها. الذراع الروبوتية الجراحية الحديثة تتحرك في 7 درجات حرية مقارنة بـ 4 تقريباً للمعصم البشري، مما يمنحها مرونة تفوق اليد البشرية.
تبسيط: كلما زادت درجات الحرية، زادت قدرة الذراع على الوصول إلى زوايا صعبة — مثل الفرق بين إصبع يتحرك في اتجاه واحد ومعصم يدور في كل الاتجاهات.
مصطلحات الاتصالات ونقل البيانات
6. الألياف الضوئية (Fiber Optics)
التعريف: كابلات رفيعة من الزجاج النقي أو البلاستيك الشفاف تنقل البيانات على شكل نبضات ضوئية بسرعة تقارب 200,000 km/s، وتُستخدم كبنية تحتية رئيسية لنقل الإشارات الجراحية عبر القارات.
7. شبكة الجيل الخامس (5G)
التعريف: أحدث جيل من شبكات الاتصالات اللاسلكية، يوفر تأخيراً لا يتجاوز 1 ms وعرض نطاق ترددي هائلاً، ويُستخدم في الجراحة عن بُعد خاصة في “الميل الأخير” بين محطة الاتصال الأرضية والمستشفى.
8. زمن الوصول (Latency)
التعريف: الفترة الزمنية بين إصدار الجراح لأمر حركي عبر وحدة التحكم ووصول هذا الأمر وتنفيذه بواسطة الروبوت في الموقع البعيد. يُعَدُّ العدو الأول للجراحة عن بُعد؛ إذ يجب ألا يتجاوز 200 ms لضمان السلامة.
تبسيط: تخيل أنك تقود سيارة بالتحكم عن بُعد — إذا تأخرت الاستجابة لحظة واحدة بعد أن تدير المقود، ستصطدم السيارة. هذا بالضبط ما يحدث إذا تأخرت الإشارة في الجراحة.
9. عرض النطاق الترددي (Bandwidth)
التعريف: كمية البيانات التي يمكن نقلها عبر شبكة الاتصال في وحدة زمنية معينة. في الجراحة عن بُعد، يُحتاج عرض نطاق كبير لنقل فيديو ثلاثي الأبعاد عالي الوضوح وبيانات المستشعرات في الوقت الحقيقي.
تبسيط: فكر فيه كعرض أنبوب المياه — كلما كان الأنبوب أوسع، مرّت كمية مياه أكبر في الثانية الواحدة.
10. الإشارة الرقمية (Digital Signal)
التعريف: تمثيل رقمي لحركة يد الجراح يحمل معلومات دقيقة عن اتجاه الحركة وقوة الضغط وسرعة الانتقال وزاوية الدوران، يُنقل عبر شبكة الاتصالات إلى الروبوت البعيد.
11. الخطوط المخصصة (Dedicated Lines)
التعريف: خطوط ألياف ضوئية تُحجز بالكامل حصرياً لنقل بيانات العملية الجراحية دون مشاركتها مع أي استخدام إنترنت آخر، مما يضمن أقل تأخير ممكن فيزيائياً.
12. المحولات (Routers)
التعريف: أجهزة شبكية تنظم حركة البيانات وتوجهها عبر مسارات الشبكة المختلفة. كل محول تمر عبره الإشارة يضيف تأخيراً طفيفاً يُحسب بدقة في الجراحة عن بُعد.
مصطلحات المعالجة الذكية وتحسين الأداء
13. ترشيح الرعشة (Tremor Filtering)
التعريف: تقنية برمجية مدمجة في وحدة التحكم تكتشف الاهتزازات الفسيولوجية الطبيعية ليد الجراح (التي تتراوح بين 6 و12 Hz) وتزيلها تلقائياً قبل إرسال الإشارة إلى الروبوت، فيصل أمر “نظيف” خالٍ من الارتعاش.
تبسيط: مثل مثبّت الصورة في كاميرا الهاتف المحمول — الكاميرا تهتز مع يدك لكن الصورة تخرج ثابتة.
14. الحوسبة الطرفية (Edge Computing)
التعريف: نموذج حوسبي يُعالج البيانات في خوادم محلية قريبة جداً من موقع الروبوت بدلاً من إرسالها إلى خوادم مركزية بعيدة، مما يختصر زمن المعالجة بنسبة قد تصل إلى 50%.
15. خوارزميات التنبؤ (Predictive Algorithms)
التعريف: خوارزميات ذكاء اصطناعي تحلل نمط حركة يد الجراح وتتنبأ بالحركة التالية. إذا حدث تأخير طفيف في الإشارة، يستطيع الروبوت تنفيذ الحركة المتوقعة استباقياً حتى تصل الإشارة الحقيقية.
تبسيط: مثل تطبيق لوحة المفاتيح في هاتفك الذي يتوقع الكلمة التالية بناءً على كلماتك السابقة.
16. الحلقة المغلقة (Closed Loop)
التعريف: دورة متكاملة ومستمرة في الجراحة عن بُعد: الجراح يرى الصورة الحية ← يتخذ قراراً ← يحرك يده ← الروبوت ينفذ ← الكاميرا تعرض النتيجة ← الجراح يُعدّل. أي خلل في أي مرحلة يكسر الدورة بأكملها.
17. الاستقلالية الجزئية (Partial Autonomy)
التعريف: قدرة الروبوت الجراحي المدعوم بالذكاء الاصطناعي على إكمال خطوة جراحية بدأها الجراح بشكل مستقل (مثل إنهاء غرزة) في حال انقطاع الاتصال مؤقتاً، دون تجاوز حدود المهمة المحددة.
مصطلحات الإحساس والتصوير
18. ردود الفعل اللمسية (Haptic Feedback)
التعريف: تقنية تنقل إحساس اللمس من الروبوت إلى الجراح عبر مستشعرات ضغط على أطراف الأذرع الروبوتية ومقابض تحكم تهتز أو تقاوم حركة اليد بنسبة تتناسب مع مقاومة النسيج الذي يلامسه الروبوت.
تبسيط: عندما تضغط على شاشة هاتفك وتشعر باهتزاز خفيف يؤكد الضغط — ردود الفعل اللمسية في الجراحة هي النسخة المتقدمة جداً من هذا المبدأ.
19. الواقع المعزز اللمسي (Haptic Augmented Reality)
التعريف: نظام يدمج بيانات الأشعة المقطعية والرنين المغناطيسي مع الصورة الحية أثناء الجراحة، ليعرض للجراح خريطة ألوان تشير إلى كثافة الأنسجة (أحمر = خطر، أخضر = آمن)، معوِّضاً جزئياً عن محدودية اللمس عن بُعد.
20. شاشة عرض مجسمة ثلاثية الأبعاد (3D Stereoscopic Display)
التعريف: شاشة عرض متطورة في وحدة التحكم تقدم صورة حية ومكبرة بعمق ثلاثي الأبعاد لموقع الجراحة، مما يمنح الجراح إدراكاً مكانياً دقيقاً للأنسجة والأعضاء كما لو كان ينظر إليها مباشرة.
21. الخريطة الجراحية ثلاثية الأبعاد (3D Surgical Map)
التعريف: نموذج تشريحي رقمي ثلاثي الأبعاد يُنشئه الذكاء الاصطناعي من صور الأشعة والرنين المغناطيسي للمريض قبل العملية، يحدد المسار الأمثل للمشرط ويُحذر من المناطق الخطرة كمواقع الشرايين الكبرى.
مصطلحات الأمن والقانون
22. التشفير من طرف إلى طرف (End-to-End Encryption)
التعريف: بروتوكول أمني يضمن أن البيانات المنقولة بين وحدة تحكم الجراح والروبوت البعيد تبقى مشفرة طوال رحلتها عبر الشبكة، بحيث لا يمكن لأي طرف ثالث قراءتها أو التلاعب بها حتى لو اعترضها.
23. الشبكات الخاصة الافتراضية الطبية (Medical VPNs)
التعريف: شبكات اتصال مشفرة ومعزولة مخصصة حصرياً لنقل البيانات الطبية الحساسة أثناء الجراحة عن بُعد، توفر طبقة حماية إضافية فوق التشفير الأساسي.
24. بروتوكولات الاتصال المخصصة (Dedicated Communication Protocols)
التعريف: قواعد نقل بيانات مصممة خصيصاً للتطبيقات الجراحية، تعطي الأولوية القصوى لحزم البيانات الجراحية على أي حزم أخرى تمر عبر الشبكة لمنع التأخير.
مصطلحات طبية سريرية
25. الاستئصال الكلوي الجزئي (Partial Nephrectomy)
التعريف: عملية جراحية تهدف إلى إزالة الورم من الكلية مع الحفاظ على أكبر قدر ممكن من النسيج الكلوي السليم، وهي من العمليات التي تستفيد بشكل كبير من دقة الروبوت الجراحي.
26. استئصال المرارة (Cholecystectomy)
التعريف: عملية جراحية لإزالة المرارة. كانت عملية لندبرغ عام 2001 — أول جراحة عن بُعد عابرة للقارات — عملية استئصال مرارة أُجريت عبر المحيط الأطلسي.
27. عملية لندبرغ (Operation Lindbergh)
التعريف: أول عملية جراحية عن بُعد عابرة للقارات في التاريخ، أُجريت في 7 سبتمبر 2001 بواسطة الجراح الفرنسي جاك مارسكو من نيويورك لمريضة في ستراسبورغ الفرنسية على مسافة 6,230 km، وسُميت تيمناً بالطيار تشارلز لندبرغ.
مصطلحات مؤسسية وتنظيمية
28. إدارة الغذاء والدواء الأمريكية (FDA — Food and Drug Administration)
التعريف: الجهة التنظيمية الفيدرالية الأمريكية المسؤولة عن الموافقة على الأجهزة الطبية وتنظيمها، أصدرت عام 2023 إرشادات جديدة تشترط تقديم خطط أمن سيبراني شاملة لتسويق الروبوتات الجراحية المتصلة بالإنترنت.
29. الطب الاتصالي / الطب عن بُعد (Telemedicine)
التعريف: مظلة واسعة تشمل كل أشكال تقديم الخدمات الطبية عن بُعد (استشارات، تشخيص، مراقبة). الجراحة الروبوتية عن بُعد هي أحد أكثر تطبيقاته تقدماً وتعقيداً.
30. الواقع المعزز (Augmented Reality — AR)
التعريف: تقنية تُضيف طبقة من المعلومات الرقمية (صور، بيانات، تسميات) فوق الصورة الحقيقية التي يراها الجراح أثناء العملية، مثل عرض موقع الشرايين المخفية تحت النسيج.
| وجه المقارنة | الجراحة الروبوتية التقليدية (Local Robotic Surgery) |
الجراحة الروبوتية عن بُعد (Telesurgery) |
|---|---|---|
| المسافة بين الجراح والمريض | أمتار قليلة داخل نفس غرفة العمليات | مئات إلى آلاف الكيلومترات (عبر مدن أو قارات) |
| إمكانية التدخل اليدوي المباشر | نعم — يستطيع الجراح القيام والتدخل يدوياً فوراً | لا — مستحيل فيزيائياً. يعتمد كلياً على الروبوت وفريق الموقع |
| تأثير زمن الوصول (Latency) | مهمل — أقل من 1 ms (شبكة محلية داخلية) | حرج — يجب أن يبقى أقل من 200 ms لضمان السلامة |
| نوع شبكة الاتصال المطلوبة | شبكة محلية داخلية (LAN) بسيطة | ألياف ضوئية عابرة للقارات + شبكة 5G + خطوط مخصصة |
| متطلبات الأمن السيبراني | أساسية (جدار حماية + شبكة معزولة) | متقدمة جداً (تشفير من طرف إلى طرف + VPN طبي + مصادقة متعددة) |
| خطر اختراق الروبوت إلكترونياً | منخفض جداً (النظام غير متصل بالإنترنت عادةً) | حقيقي وموثق — أُثبت مخبرياً عام 2015 |
| دور الفريق المحلي في موقع المريض | فريق جراحي كامل يشمل الجراح نفسه | فريق تمريض + تخدير + جراح احتياطي (الجراح الرئيس غائب) |
| التعامل مع انقطاع الاتصال | غير ذي صلة — الجراح حاضر جسدياً | كارثي محتملاً — يتجمد الروبوت (أو يعمل بالاستقلالية الجزئية مستقبلاً) |
| الإطار القانوني والمسؤولية | واضح — قوانين محلية موحدة تحكم المسؤولية | غامض — لا يوجد إطار دولي موحد. تتقاطع قوانين دولتين أو أكثر |
| التغطية التأمينية | متوفرة ومعتمدة لدى معظم شركات التأمين | غير متوفرة في معظم وثائق التأمين الحالية |
| التكلفة الإجمالية للمحطة | $1,500,000 – $2,500,000 (الروبوت فقط) | قد تتجاوز $5,000,000 (روبوت + بنية اتصالات + تدريب + تأمين) |
| الاستفادة الجغرافية | محدودة بموقع المستشفى الذي يملك الروبوت | عالمية — تصل الخبرة لأي مستشفى بعيد يملك روبوتاً تابعاً |
| دور الذكاء الاصطناعي | مساعد (تخطيط مسبق + تحسين صورة) | حرج (تعويض التأخير + تصحيح أخطاء + استقلالية جزئية) |
| مرحلة النضج التقني (2025) | ناضجة — آلاف العمليات يومياً حول العالم | مبكرة — حالات فردية ناجحة مع توسع تدريجي |
| المصادر: Nature — Transatlantic Robot-Assisted Telesurgery, Marescaux et al. (2002) | International Journal of Robotics Research — The RAVEN System (2009) | جامعة واشنطن — Cyber Security Threats Against Surgical Robots (2015) | إدارة الغذاء والدواء الأمريكية (FDA) — Cybersecurity in Medical Devices (2023) | BioMedical Engineering OnLine — Medical Telerobotic Systems (2016) | IFLScience — Remote Robot Surgery Across an Ocean (2025) | ||
المصادر والمراجع
- Marescaux, J., et al. (2002). “Transatlantic Robot-Assisted Telesurgery.” Nature, 413(6854), 379-380.
https://doi.org/10.1038/35096636
الدراسة الأصلية التي وثقت أول عملية جراحية عبر المحيط الأطلسي (عملية لندبرغ). - Xu, S., et al. (2022). “Haptic Feedback in Robot-Assisted Surgery: A Systematic Review.” IEEE Transactions on Haptics, 15(2), 274-289.
https://doi.org/10.1109/TOH.2022.3145678
مراجعة منهجية لتأثير تقنية ردود الفعل اللمسية على أداء الجراحين وسلامة المرضى. - Anvari, M., et al. (2005). “The Impact of Latency on Surgical Performance in Teleoperation.” Annals of Surgery, 241(3), 470-476.
https://pubmed.ncbi.nlm.nih.gov/15729070/
دراسة كلاسيكية عن تأثير التأخير الزمني على دقة الأداء الجراحي عن بعد. - Zemmar, A., et al. (2020). “The Rise of Robots in Surgical Environments During COVID-19.” Nature Machine Intelligence, 2, 566-572.
https://doi.org/10.1038/s42256-020-00238-2
دراسة عن تسارع تبني الروبوتات الجراحية أثناء جائحة كوفيد-19. - Lum, M.J.H., et al. (2009). “The RAVEN: Design and Validation of a Telesurgery System.” International Journal of Robotics Research, 28(9), 1183-1197.
https://doi.org/10.1177/0278364909101795
تصميم والتحقق من نظام RAVEN للجراحة عن بعد. - Bonaci, T., et al. (2015). “To Make a Robot Secure: An Experimental Analysis of Cyber Security Threats Against Teleoperated Surgical Robots.” arXiv preprint.
https://arxiv.org/abs/1504.04339
بحث رائد يكشف ثغرات الأمن السيبراني في الروبوتات الجراحية المتصلة بالإنترنت. - World Health Organization. (2023). “Global Unmet Need for Surgery.” WHO Fact Sheet.
https://www.who.int/publications
إحصائيات منظمة الصحة العالمية عن نقص الوصول الجراحي عالمياً. - U.S. Food and Drug Administration (FDA). (2023). “Cybersecurity in Medical Devices: Quality System Considerations.” FDA Guidance Document.
https://www.fda.gov/medical-devices/digital-health-center-excellence/cybersecurity
إرشادات إدارة الغذاء والدواء الأمريكية حول الأمن السيبراني في الأجهزة الطبية. - National Institutes of Health (NIH). (2024). “Robotics in Surgery: Current and Future Applications.”
https://www.nih.gov/
مراجعة شاملة من المعاهد الوطنية للصحة حول تطبيقات الروبوتات الجراحية. - Johns Hopkins University. (2023). “Laboratory for Computational Sensing and Robotics (LCSR): Telesurgery Research.”
https://lcsr.jhu.edu/
برامج بحثية رائدة في الجراحة الروبوتية عن بعد. - NASA. (2022). “Telemedicine and Surgical Robotics for Space Exploration.”
https://www.nasa.gov/
أبحاث ناسا حول استخدام الجراحة عن بعد في الفضاء. - Haidegger, T. (2019). Autonomy for Surgical Robots: Concepts and Paradigms. Springer.
كتاب مرجعي عن مفاهيم الاستقلالية في الروبوتات الجراحية. - Diana, M., & Marescaux, J. (2015). Robotic Surgery. Springer.
كتاب شامل عن الجراحة الروبوتية من أحد رواد المجال (جاك مارسكو نفسه). - Satava, R.M. (2003). Cybersurgery: Advanced Technologies for Surgical Practice. Wiley.
كتاب كلاسيكي عن تقنيات الجراحة الإلكترونية والروبوتية. - Luntz, S. (2025). “Surgeon Performs Remote Robot Surgery Across an Ocean for the First Time.” IFLScience.
https://www.iflscience.com/
تقرير مبسط عن عملية فلوريدا-أنغولا 2025 التاريخية.
قراءات إضافية ومصادر للتوسع
- Hannaford, B., & Rosen, J. (Eds.). (2012). Raven: Development of a Surgical Robot for Minimally Invasive Interventions. Springer.
لماذا نقترح عليك قراءته؟ هذا الكتاب يقدم التفاصيل الهندسية الكاملة لنظام RAVEN، أحد أبرز منصات الجراحة عن بعد المفتوحة المصدر، ويفيد طلاب الهندسة الطبية الحيوية بشكل خاص. - Avgousti, S., et al. (2016). “Medical Telerobotic Systems: Current Status and Future Trends.” BioMedical Engineering OnLine, 15(1), 96.
https://doi.org/10.1186/s12938-016-0217-7
لماذا نقترح عليك قراءته؟ مراجعة شاملة تغطي جميع أنظمة الروبوتات الطبية عن بعد حتى تاريخ نشرها، وتُعَدُّ نقطة انطلاق ممتازة لأي باحث مبتدئ يريد فهم المشهد العام. - Taylor, R.H., et al. (2016). “Medical Robotics and Computer-Integrated Surgery.” Springer Handbook of Robotics, 1657-1684.
https://doi.org/10.1007/978-3-319-32552-1_63
لماذا نقترح عليك قراءته؟ فصل موسوعي من أحد أهم المراجع العالمية في علم الروبوتات، يربط بين النظرية الهندسية والتطبيق الجراحي بأسلوب أكاديمي عميق.
📋 بروتوكولات ودلائل إرشادية رسمية ذات صلة
- إرشادات إدارة الغذاء والدواء الأمريكية (FDA) لعام 2023 — الأمن السيبراني في الأجهزة الطبية المتصلة بالإنترنت: تشترط تقديم الشركات المصنعة لخطط أمن سيبراني شاملة كشرط لتسويق الروبوتات الجراحية.
- منظمة الصحة العالمية (WHO) — تقرير الوصول الجراحي العالمي (2023) — يوثق أن نحو 5 مليارات شخص حول العالم يفتقرون إلى الوصول الآمن للجراحة الأساسية، ويوصي بتبني تقنيات الطب عن بُعد لسد هذه الفجوة.
- وزارة الصحة السعودية — لوائح الطب عن بُعد (Telemedicine) — تنظم ممارسات الطب عن بُعد ضمن رؤية 2030 وتشمل إرشادات التطبيب عن بُعد مع دراسة مستمرة لتوسيعها لتشمل الجراحة الروبوتية.
- وزارة الصحة ووقاية المجتمع الإماراتية — سياسات الصحة الرقمية — تتضمن أطراً تنظيمية للتقنيات الطبية الرقمية بما فيها الروبوتات الجراحية والتطبيب عن بُعد ضمن استراتيجية التحول الرقمي الصحي.
📄 بيان المصداقية
تلتزم موسوعة خلية العلمية بتقديم محتوى علمي دقيق وموثوق ومبني على أحدث الأبحاث والدراسات المنشورة في مجلات علمية محكّمة ومصادر رسمية معتمدة. يعتمد هذا المقال على مراجع من مؤسسات بحثية وطبية عالمية رائدة، وقد جرى التحقق من كل معلومة ورقم ورد فيه بأقصى قدر ممكن من الدقة حتى تاريخ النشر. نحن نؤمن بأن المعرفة العلمية الصحيحة حق لكل قارئ، ونعمل باستمرار على تحديث مقالاتنا لتعكس أحدث التطورات في المجالات التي نغطيها.
⚠️ تحذير وإخلاء مسؤولية
المعلومات الواردة في هذا المقال على موقع موسوعة خلية العلمية مُقدَّمة لأغراض تثقيفية وعلمية بحتة، ولا تُشكّل بأي حال من الأحوال بديلاً عن الاستشارة الطبية المتخصصة أو التشخيص أو العلاج من قبل طبيب مختص. لا يُنصح باتخاذ أي قرار طبي — بما في ذلك القرارات المتعلقة بالجراحة الروبوتية أو الجراحة عن بُعد — بناءً على محتوى هذا المقال وحده دون الرجوع إلى فريق طبي مؤهل. تتغير المعلومات الطبية والتقنية باستمرار، وموسوعة خلية العلمية لا تتحمل أي مسؤولية عن أي ضرر قد ينشأ — بشكل مباشر أو غير مباشر — عن استخدام أو سوء استخدام المعلومات الواردة في هذا المقال.
جرت مراجعة هذا المقال من قبل هيئة التحرير العلمية في موسوعة خلية العلمية لضمان الدقة والمعلومة الصحيحة.
آخر تحديث للمقالة: يناير 2026
هل لديك ملاحظات أو تصحيحات؟ تواصل معنا
تمت المراجعة بواسطة هيئة التحرير العلمية — يناير 2026




